Vous pouvez télécharger ce cours au format pdf : Télécharger
Chapitre 7
Essais avec enregistrements
Il s’agit de vérifier la validité des calculs précédents et en particulier s’il est bien vrai que la tension d’induit passe par un maximum en fin d’accélération, ce qui représente l’instant le plus critique en terme de saturation.
Essais avec enregistrements
Les essais ont été réalisés dans les conditions suivantes
Robot 2007 légèrement modifié :
M = 12.7 kg
Moteurs RE025 avec réducteur de rapport 20.25
Valeurs de consigne :
Distance= 80cm
Accélération= 0.5g
Asservissement de position avec correcteur dérivé à peu près optimisé
Essai de 2 vitesses: 0.8m/s et 1.4m/s
Par application de la formule qui donne la vitesse max en fonction de γ ,
on trouve vmax=1.5 m/s pour l’accélération choisie de 0.5g (Fonctionnement en limite de saturation).
Pour l’essai à 0.5g à la vitesse de 1.4m/s, ça bombarde sérieux ☺
Distance parcourue fonction du temps
Toutes ces courbes ne sont pas des simulations, mais correspondent à des enregistrements qui utilisent un simple débuger écrit en C graphique.
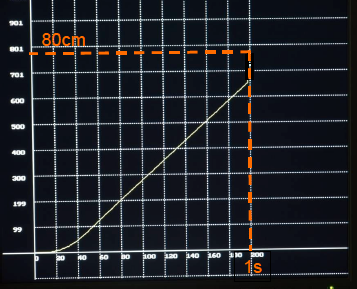
Vitesse=0.8m/s
La distance a été parcourue en 1.2s
L’enregistrement s’arrête à 1s.
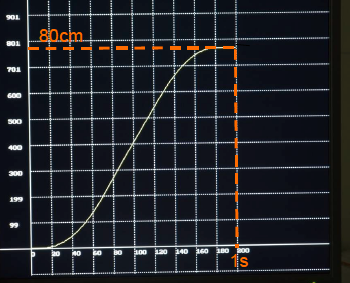
Vitesse=1.4m/s
Départ et freinage en douceur.
Pas de dépassement perceptible en fin de freinage
(En fait, il existe un très léger dépassement de quelques mm, invisible ici à cette échelle)
80 cm parcourus en à peine 1s !!
Évolution de la vitesse
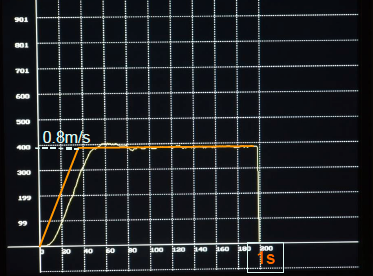
Vitesse de 0.8m/s
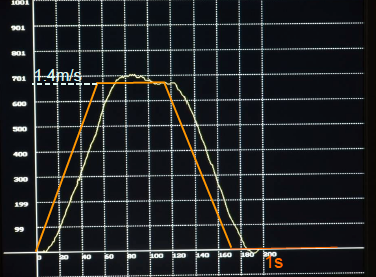
Vitesse de 1.4m/s
En rouge, le profil trapézoïdal de consigne de vitesse (Rapporté à la main sur les photos)
On remarque:
Une erreur de traînage pendant les phases accélération et freinage.
Un écart nul pendant la phase à vitesse constante.
Un léger dépassement de la vitesse en fin d’accélération et un très léger dépassement en fin de freinage
Evolution de la commande des moteurs
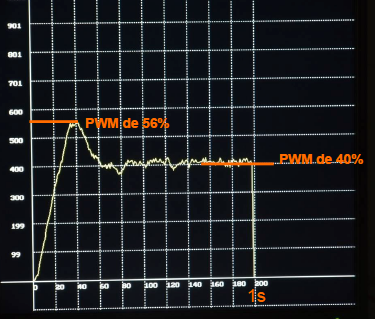
Vitesse de 0.8 m/s
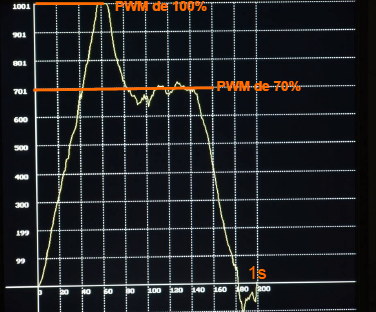
Vitesse de 1.4m/s
Les essais confirment que la tension d’induit passe bien par son maximum à la fin de la phase accélération.
A 1.4 m/s, on commence à saturer alors qu’il était prévu 1.5m/s (m’enfin ).
Le bruit sur la commande pendant la phase à vitesse constante est inéluctable (dû en partie au bruit de quantification du terme dérivé). et sans conséquence sur la distance (filtrage par la constante de temps mécanique).